時系列データの準備
このチュートリアルでは、上図のような5点についての10個の時系列計測データを使用します(データの書式は、通常データと同じです。こちらをご参照ください)。
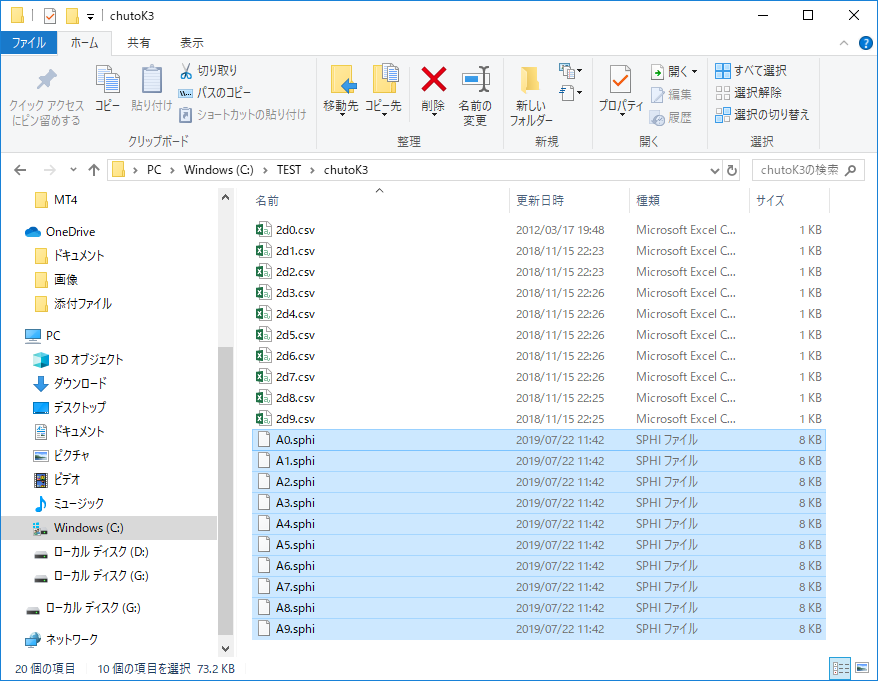
ファイルはここからダウンロードできます。
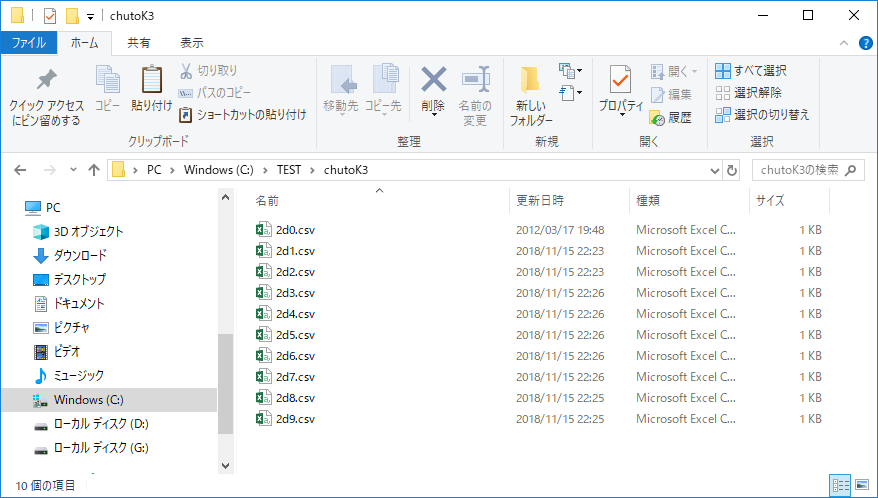
ダウンロードしたchutoK3.zipを解凍し、Cドライブ直下にTESTというフォルダを作り、その中に、chutoK3フォルダコピーしてください(下図参照)。
luaによるプログラミング
-
「Lua」ボタンの中の「Edit」をクリックして「FunctionSamples.lua」と「UserMain.lua」をご自分のPCで使用できるテキスト編集ソフトで開きます。
このチュートリアルでは、無料ソフトの「Visual Studio Code」を使用します。
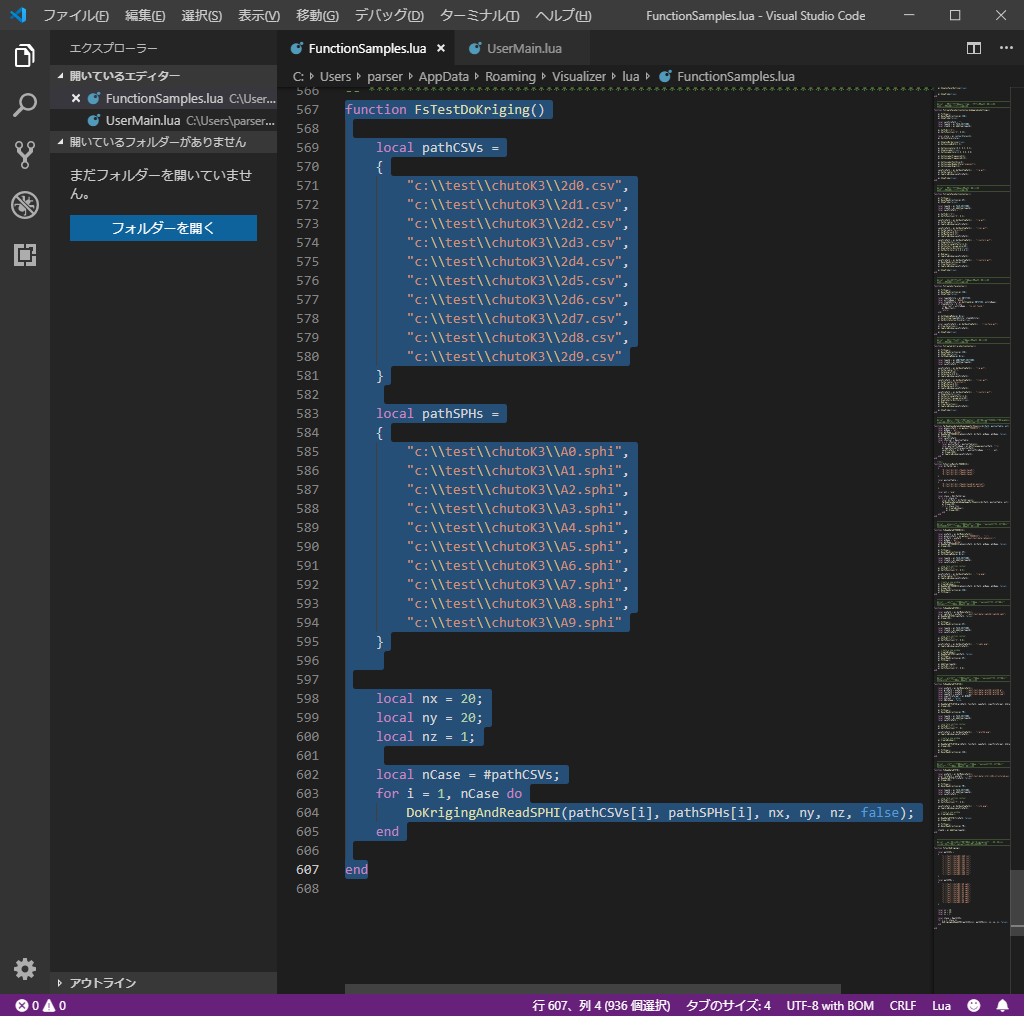
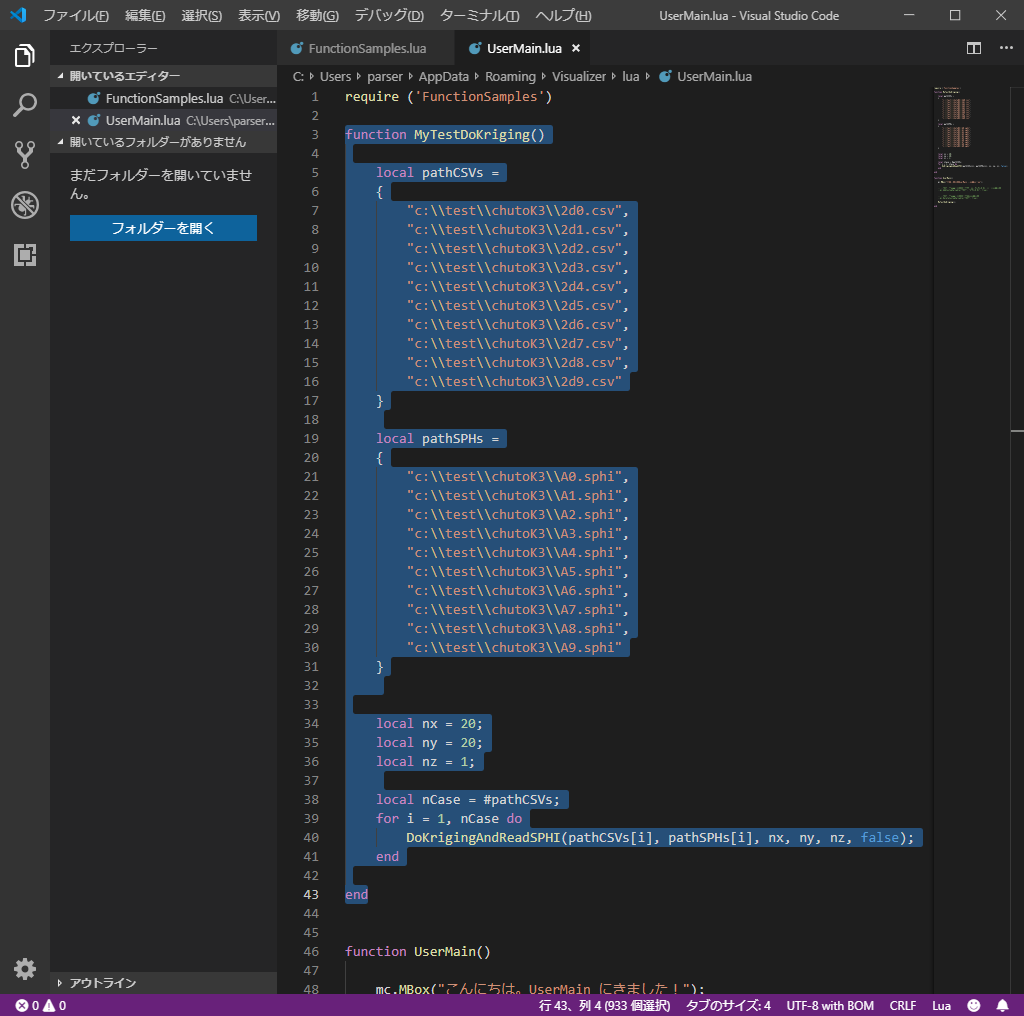
- FunctionSamples.luaの中の1番下にある「function FsTestDoKriging()」を全てコピーして、UserMain.luaの上部に貼り付けて関数名を「MyTestDoKriging」に変更します(下図参照)。
-
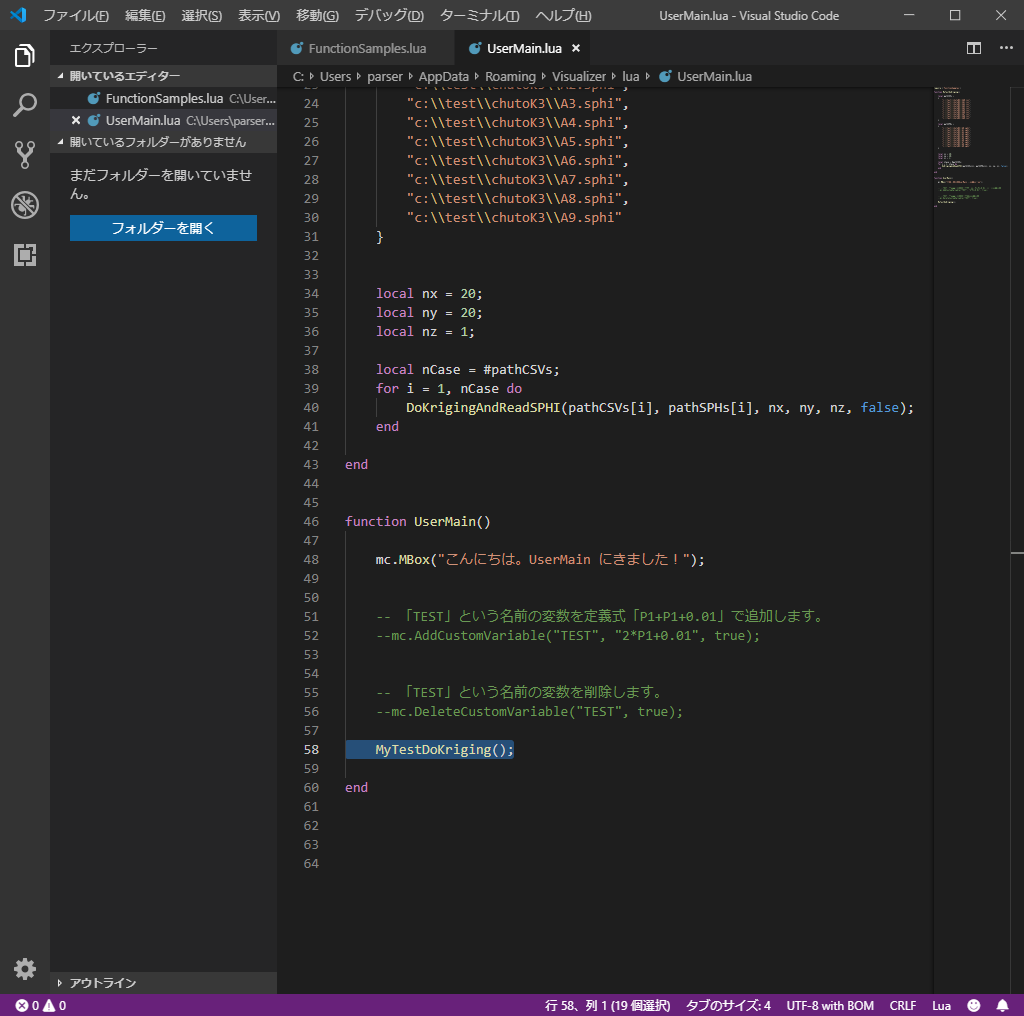
「function UserMain()」の最後に、「MyTestDoKriging();」を貼り付けます。
【プログラムの解説】
- プログラム内のローカル変数「local pathCSVs」は、テーブル変数で、クリギング補間したい入力データファイルのパスです。
対象のファイルを変更したい場合は、この部分を修正してください。
- プログラム内のローカル変数「local pathSPHs」は、テーブル変数で出力ファイルのパスが格納されています。
名前を変更したい場合は、この部分を変更してください。
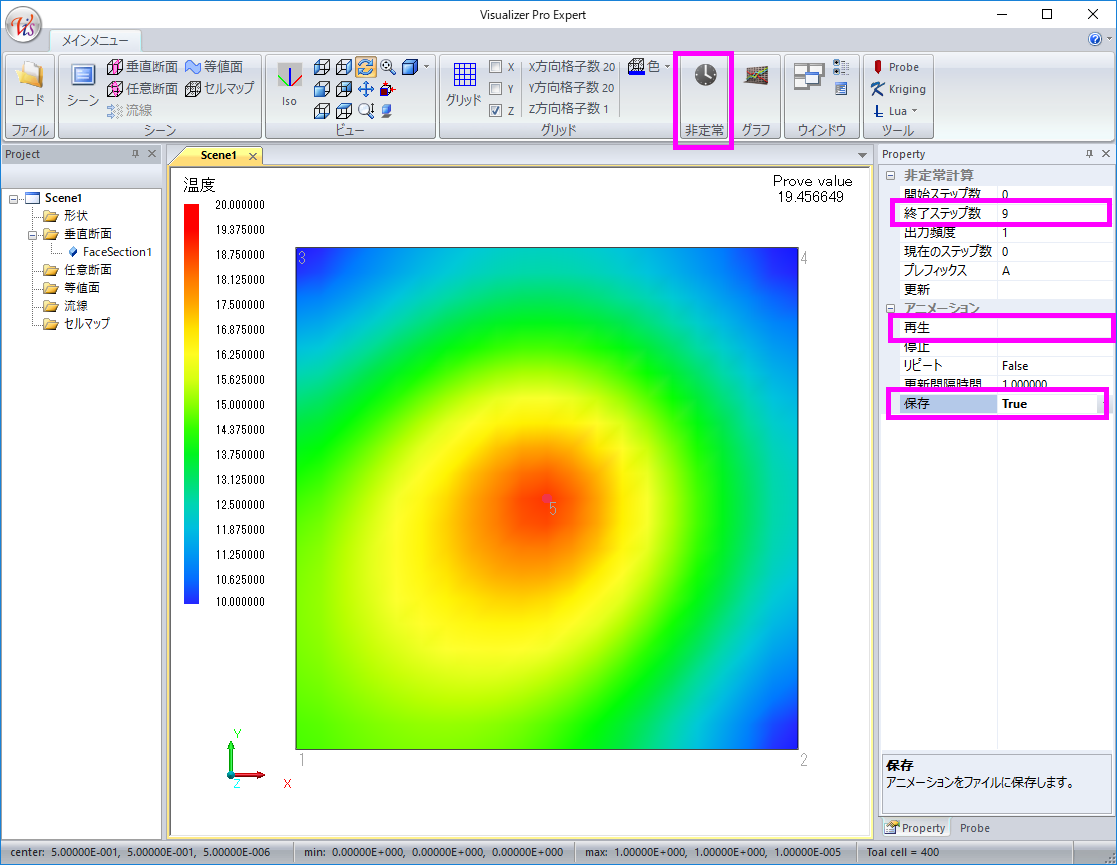
なお、このチュートリアルでは、計算結果を非定常メニューで取り扱うために、非定常計算用の命名規則に従ってファイル名を決めています。
-
ローカル変数「local nx = 20」、「local ny = 20」、「local nz = 1」はそれぞれX,Y,Z方向の格子分割数です。
このチュートリアルでは、小さい値を設定していますが、実際には、2次元の場合は「ny=50, ny=50, nz=1」、
3次元の場合は「nx =30, ny=30, nz =30」が目安値ですが必要な解像度に応じて変更してください。
-
「local nCase = #pathCSVs;」から「end」までの行では、入力データファイルの数でループしながらクリギング補間を実行しています。
この部分については、変更する必要はありません。
-
「function UserMain()」に貼り付けた、「MyTestDoKriging();」の意味は、関数UserMain()内で、関数MyTestDoKriging()を実行するという意味です。
なお、使用しなくなった場合は、行頭に「--」を書き込んでください。これでその行を無効にできます。
以上でプログラミングは終了です。クリギング補間を連続実行する機能(関数)ができました。
|